Physical Address
304 North Cardinal St.
Dorchester Center, MA 02124
Physical Address
304 North Cardinal St.
Dorchester Center, MA 02124

[ad_1]
On Github Stephan Sturges has launched the newest model of a Free-to-use ground-level obstacle-detection segmentation AI for UAV which you’ll deploy as we speak utilizing low cost off-the-shelf sensors from Luxonis. He writes:-

The default neural community now includes a 3-class output with the detection of people on a separate output layer! That is to permit finer granularity impediment avoidance: if you need to fall out of the sky now you can resolve whether or not it’s finest to drop your drone on prime of a constructing or on somebody’s head 😉
You’ll need any Luxonis system with an RGB digital camera and the proper model of the depthai-python library put in in your platform and system mixture. By way of real-world use I might suggest that you simply get a tool with a world shutter RGB digital camera with excessive gentle sensitivity and comparatively low optical distortion.
If you don’t but personal an OAK-series digital camera from Luxonis and wish one to make use of with this repository, your finest guess is to get an OAK-1 system modified with an OV9782 sensor with the “commonplace FOV”. That is do it:
… after which wait every week or so in your global-shutter, fixed-focus, high-sensitivity sensor to reach 🙂
Within the newbie {and professional} UAV area there’s a want for easy and low cost instruments that can be utilized to find out secure emergency touchdown spots, avoiding crashes and potential hurt to individuals.
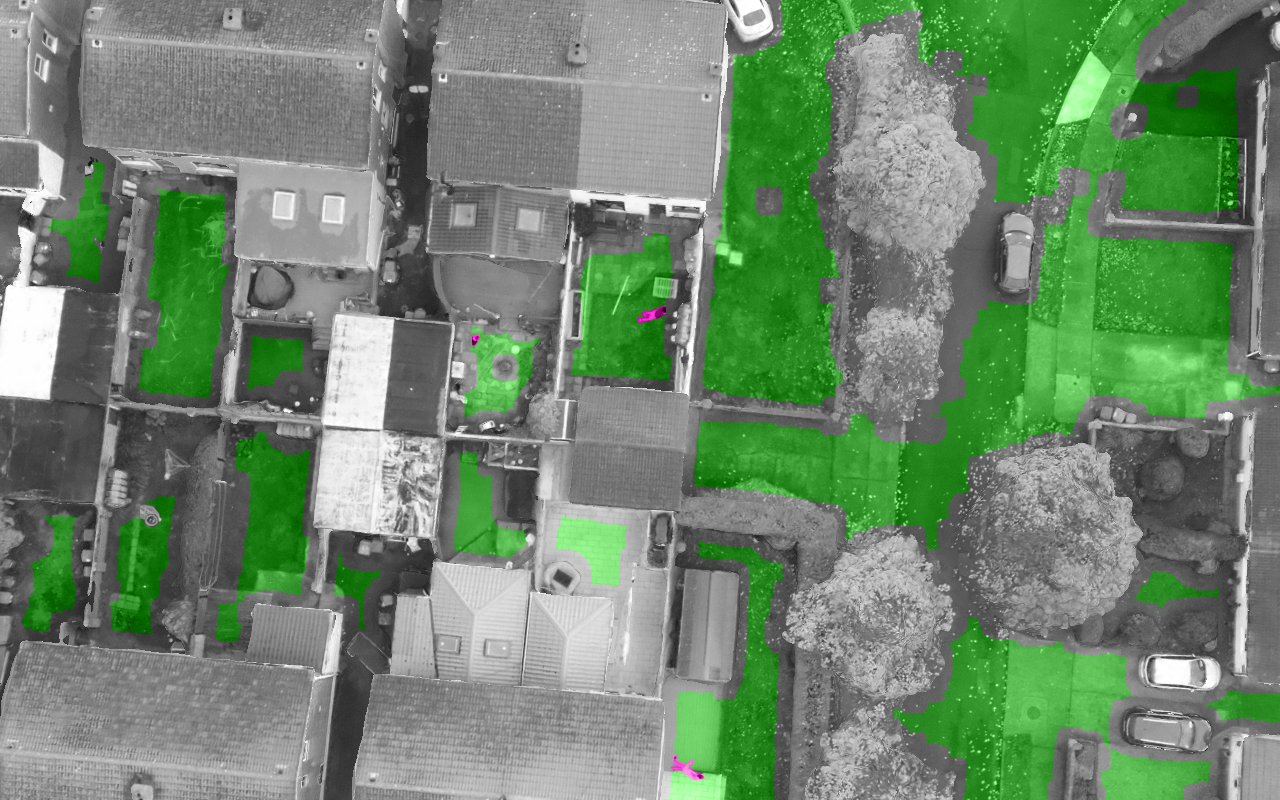
The neural community performs pixelwise segmentation, and is educated from my very own pipeline of artificial knowledge. This public model is educated on about 500Gb of knowledge. There’s a new model educated on 4T of knowledge that I’ll publish quickly, if you wish to take a look at it simply contact me through e-mail.




These are sadly all made with an outdated model of the neural community, however I don’t have my very own drone to make extra :-p The present gen community performs not less than 5x higher on a combined dataset, and is a large step up in real-world use.
(masked space is “touchdown secure”)






FYI there’s a extra superior model of OpenLander that I’m creating as a industrial product, which incorporates depth sensing, IMU, extra superior neural networks, custom-developed sensors and an entire lot extra stuff. In case you’re intersted in that be at liberty to contact me through e-mail (my title @ gmail).
Right here’s a fast screengrab of deconflicting touchdown spots with depth sensing (this runs in parallel to the DNN system): depth_video.mov
There shall be updates sooner or later, however I’m additionally creating {custom} variations of the neural community for particular industrial use circumstances and I received’t be including all the things to OpenLander. OpenLander will stay free to make use of and is destined to enhancing security of UAVs for all who take pleasure in utilizing them!
Some code taken from the wonderful https://github.com/luxonis/depthai-experiments from Luxonis.
[ad_2]